

行業新聞
人工智能‖深入解析無人駕駛
日期:2018-12-10
來源:J9九游会中国
定位技術是自動駕駛車輛行駛的基礎。目前常用的技術包括線導航、磁導航、無線導航、視覺導航、導航、激光導航等。
其中磁導航是目前最成熟可靠的方案,現有大多數應用均采用這種導航技術。磁導航技術通過在車道上埋設磁性標誌來給車輛提供車道的邊界信息,磁性材料具有好的環境適應性,它對雨天,冰雪覆蓋,光照不足甚至無光照的情況都可適應,不足之處是需要對現行的道路設施作出較大的改動,成本較高。同時磁性導航技術無法預知車道前方的障礙,因而不可能單獨使用。
視覺導航對基礎設施的要求較低,被認為是最有前景的導航方法。在高速路和城市環境中視覺方法受到了較大的關注。
無人駕駛汽車感知依靠傳感器。目前傳感器性能越來越高、體積越來越小、功耗越來越低,其飛速發展是無人駕駛熱潮的重要推手。反過來,無人駕駛又對車載傳感器提出了更高的要求,又促進了其發展。
用於無人駕駛的傳感器可以分為四類:
雷達傳感器。
主要用來探測一定範圍內障礙物(比如車輛、行人、路肩等)的方位、距離及移動速度,常用車載雷達種類有激光雷達、毫米波雷達和超聲波雷達。激光雷達精度高、探測範圍廣,但成本高,比如Google無人車頂上的64線激光雷達成本高達70多萬元人民幣;毫米波雷達成本相對較低,探測距離較遠,被車企廣泛使用,但與激光雷達比精度稍低、可視角度偏小;超聲波雷達成本最低,但探測距離近、精度低,可用於低速下碰撞預警。
視覺傳感器。
主要用來識別車道線、停止線、交通信號燈、交通標誌牌、行人、車輛等。常用的有單目攝像頭、雙目攝像頭、紅外攝像頭。視覺傳感器成本低,相關研究與產品非常多,但視覺算法易受光照、陰影、汙損、遮擋影響,準確性、魯棒性有待提高。所以,作為人工智能技術廣泛應用的領域之一的圖像識別,也是無人駕駛汽車領域的一個研究熱點。
定位及位姿傳感器。
主要用來實時高精度定位以及位姿感知,比如獲取經緯度坐標、速度、加速度、航向角等,一般包括全球衛星定位係統(GNSS)、慣性設備、輪速計、裏程計等。現在國內常用的高精度定位方法是使用差分定位設備,如RTK-GPS,但需要額外架設固定差分基站,應用距離受限,而且易受建築物、樹木遮擋影響。近年來很多省市的測繪部門都架設了相當於固定差分基站的連續運行參考站係統(CORS),比如遼寧、湖北、上海等,實現了定位信號的大範圍覆蓋,這種基礎設施建設為智能駕駛提供了有力的技術支撐。定位技術是無人駕駛的核心技術,因為有了位置信息就可以利用豐富的地理、地圖等先驗知識,可以使用基於位置的服務。
車身傳感器。
來自車輛本身,通過整車網絡接口獲取諸如車速、輪速、檔位等車輛本身的信息。
駕駛員認知靠大腦,無人駕駛汽車的“大腦”則是計算機。無人車裏的計算機與我們常用的台式機、筆記本略有不同,因為車輛在行駛的時候會遇到顛簸、震動、粉塵甚至高溫的情況,一般計算機無法長時間運行在這些環境中。所以無人車一般選用工業環境下的計算機——工控機。
工控機上運行著操作係統,操作係統中運行著無人駕駛軟件。如圖1所示為某無人駕駛車軟件係統架構。操作係統之上是支撐模塊(這裏模塊指的是計算機程序),對上層軟件模塊提供基礎服務。
支撐模塊包括:虛擬交換模塊,用於模塊間通信;日誌管理模塊,用於日誌記錄、檢索以及回放;進程監控模塊,負責監視整個係統的運行狀態,如果某個模塊運行不正常則提示操作人員並自動采取相應措施;交互調試模塊,負責開發人員與無人駕駛係統交互。
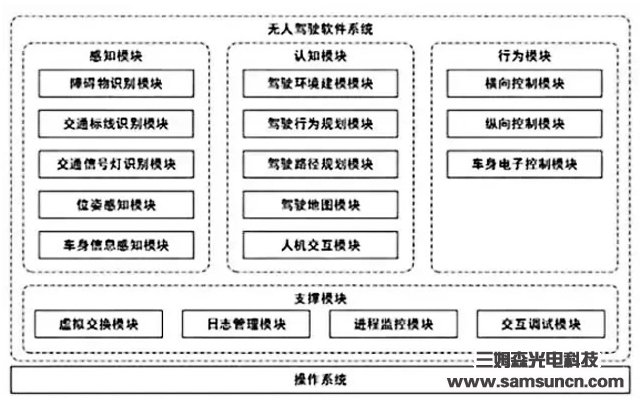 圖:某無人駕駛車軟件係統架構
圖:某無人駕駛車軟件係統架構
除了對外界進行認知之外,機器還必須要能夠進行學習。深度學習是無人駕駛技術成功地基礎,深度學習是源於人工神經網絡的一種高效的機器學習方法。深度學習可以提高汽車識別道路、行人、障礙物等的時間效率,並保障了識別的正確率。通過大量數據的訓練之後,汽車可以將收集到的圖形,電磁波等信息轉換為可用的數據,利用深度學習算法實現無人駕駛。
其中磁導航是目前最成熟可靠的方案,現有大多數應用均采用這種導航技術。磁導航技術通過在車道上埋設磁性標誌來給車輛提供車道的邊界信息,磁性材料具有好的環境適應性,它對雨天,冰雪覆蓋,光照不足甚至無光照的情況都可適應,不足之處是需要對現行的道路設施作出較大的改動,成本較高。同時磁性導航技術無法預知車道前方的障礙,因而不可能單獨使用。
視覺導航對基礎設施的要求較低,被認為是最有前景的導航方法。在高速路和城市環境中視覺方法受到了較大的關注。
無人駕駛汽車感知依靠傳感器。目前傳感器性能越來越高、體積越來越小、功耗越來越低,其飛速發展是無人駕駛熱潮的重要推手。反過來,無人駕駛又對車載傳感器提出了更高的要求,又促進了其發展。
用於無人駕駛的傳感器可以分為四類:
雷達傳感器。
主要用來探測一定範圍內障礙物(比如車輛、行人、路肩等)的方位、距離及移動速度,常用車載雷達種類有激光雷達、毫米波雷達和超聲波雷達。激光雷達精度高、探測範圍廣,但成本高,比如Google無人車頂上的64線激光雷達成本高達70多萬元人民幣;毫米波雷達成本相對較低,探測距離較遠,被車企廣泛使用,但與激光雷達比精度稍低、可視角度偏小;超聲波雷達成本最低,但探測距離近、精度低,可用於低速下碰撞預警。
視覺傳感器。
主要用來識別車道線、停止線、交通信號燈、交通標誌牌、行人、車輛等。常用的有單目攝像頭、雙目攝像頭、紅外攝像頭。視覺傳感器成本低,相關研究與產品非常多,但視覺算法易受光照、陰影、汙損、遮擋影響,準確性、魯棒性有待提高。所以,作為人工智能技術廣泛應用的領域之一的圖像識別,也是無人駕駛汽車領域的一個研究熱點。
定位及位姿傳感器。
主要用來實時高精度定位以及位姿感知,比如獲取經緯度坐標、速度、加速度、航向角等,一般包括全球衛星定位係統(GNSS)、慣性設備、輪速計、裏程計等。現在國內常用的高精度定位方法是使用差分定位設備,如RTK-GPS,但需要額外架設固定差分基站,應用距離受限,而且易受建築物、樹木遮擋影響。近年來很多省市的測繪部門都架設了相當於固定差分基站的連續運行參考站係統(CORS),比如遼寧、湖北、上海等,實現了定位信號的大範圍覆蓋,這種基礎設施建設為智能駕駛提供了有力的技術支撐。定位技術是無人駕駛的核心技術,因為有了位置信息就可以利用豐富的地理、地圖等先驗知識,可以使用基於位置的服務。
車身傳感器。
來自車輛本身,通過整車網絡接口獲取諸如車速、輪速、檔位等車輛本身的信息。
駕駛員認知靠大腦,無人駕駛汽車的“大腦”則是計算機。無人車裏的計算機與我們常用的台式機、筆記本略有不同,因為車輛在行駛的時候會遇到顛簸、震動、粉塵甚至高溫的情況,一般計算機無法長時間運行在這些環境中。所以無人車一般選用工業環境下的計算機——工控機。
工控機上運行著操作係統,操作係統中運行著無人駕駛軟件。如圖1所示為某無人駕駛車軟件係統架構。操作係統之上是支撐模塊(這裏模塊指的是計算機程序),對上層軟件模塊提供基礎服務。
支撐模塊包括:虛擬交換模塊,用於模塊間通信;日誌管理模塊,用於日誌記錄、檢索以及回放;進程監控模塊,負責監視整個係統的運行狀態,如果某個模塊運行不正常則提示操作人員並自動采取相應措施;交互調試模塊,負責開發人員與無人駕駛係統交互。
除了對外界進行認知之外,機器還必須要能夠進行學習。深度學習是無人駕駛技術成功地基礎,深度學習是源於人工神經網絡的一種高效的機器學習方法。深度學習可以提高汽車識別道路、行人、障礙物等的時間效率,並保障了識別的正確率。通過大量數據的訓練之後,汽車可以將收集到的圖形,電磁波等信息轉換為可用的數據,利用深度學習算法實現無人駕駛。
