

技術文章
一文了解工業機器人視覺係統
日期:2019-03-05
來源:J9九游会中国
很多機器視覺包含了時鍾/計時器,所以檢測操作的每一步所需要的時間都可以準確測量,從這些數據,我們就可以修改我們的程序以滿足時間上的要求。通常,一個基於PC的機器視覺係統每一秒可以檢測20-25個部件,與檢測部件的多少和處理程序以及計算機的速度有密切關係。
工業機器人的眼睛視覺係統通常由以下構成
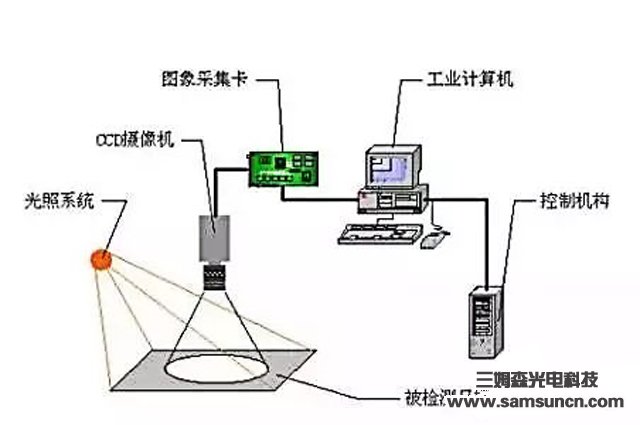 01、攝像頭和光學部件
01、攝像頭和光學部件
這一類通常含有一個或多個攝像頭和鏡頭(光學部件),用於拍攝被檢測的物體。根據應用,攝像頭可以基於如下標準,黑白、複合彩色(Y/C),RGB彩色,非標準黑白(可變掃描),步進掃描(progressive-scan)或線掃描。
02、燈光
燈光用於照亮部件,以便從攝像頭中拍攝到更好的圖像,燈光係統可以在不同形狀、尺寸和亮度。一般的燈光形式是高頻熒光燈、LED、白熾燈和石英鹵(quartz-halogen)光纖。
03、部件傳感器
通常以光柵或傳感器的形式出現。當這個傳感器感知到部件靠近,它會給出一個觸發信號。當部件處於正確位置時,這個傳感器告訴機器視覺係統去采集圖像。
04、圖像采集卡
也稱為視頻抓取卡,這個部件通常是一張插在PC上的卡。
這張采集卡的作用將攝像頭與PC連接起來。它從攝像頭中獲得數據(模擬信號或數字信號),然後轉換成PC能處理的信息。
它同時可以提供控製攝像頭參數(例如觸發、曝光時間、快門速度等等)的信號。圖像采集卡形式很多,支持不同類型的攝像頭,不同的計算機總線。
05、PC平台
計算機是機器視覺的關鍵組成部分。
應用在檢測方麵,通常使用Pentium或更高的CPU。一般來講,計算機的速度越快,視覺係統處理每一張圖片的時間就越短。
由於在製造現場中,經常有振動、灰塵、熱輻射等等,所以一般需要工業級的計算機。
06、檢測軟件
機器視覺軟件用於創建和執行程序、處理采集回來的圖像數據、以及作出“通過/失敗(PASS/FAIL)”決定。
機器視覺有多種形式(C語言庫、ActiveX控件、點擊編程環境等等),可以是單一功能(例如設計隻用來檢測LCD或BGA、對齊任務等等),也可以是多功能(例如設計一個套件,包含計量、條形碼閱讀、機器人導航、現場驗證等等)。
07、數字I/O和網絡連接
一旦係統完成這個檢測部分,這部分必須能與外界通信,例如需要控製生產流程、將“通過/失敗(PASS/FAIL)”的信息送給數據庫。通常,使用一張數字I/O板卡和(或)一張網卡來實現機器視覺係統與外界係統和數據庫的通信。
工業機器人的眼睛視覺係統通常由以下構成
這一類通常含有一個或多個攝像頭和鏡頭(光學部件),用於拍攝被檢測的物體。根據應用,攝像頭可以基於如下標準,黑白、複合彩色(Y/C),RGB彩色,非標準黑白(可變掃描),步進掃描(progressive-scan)或線掃描。
02、燈光
燈光用於照亮部件,以便從攝像頭中拍攝到更好的圖像,燈光係統可以在不同形狀、尺寸和亮度。一般的燈光形式是高頻熒光燈、LED、白熾燈和石英鹵(quartz-halogen)光纖。
03、部件傳感器
通常以光柵或傳感器的形式出現。當這個傳感器感知到部件靠近,它會給出一個觸發信號。當部件處於正確位置時,這個傳感器告訴機器視覺係統去采集圖像。
04、圖像采集卡
也稱為視頻抓取卡,這個部件通常是一張插在PC上的卡。
這張采集卡的作用將攝像頭與PC連接起來。它從攝像頭中獲得數據(模擬信號或數字信號),然後轉換成PC能處理的信息。
它同時可以提供控製攝像頭參數(例如觸發、曝光時間、快門速度等等)的信號。圖像采集卡形式很多,支持不同類型的攝像頭,不同的計算機總線。
05、PC平台
計算機是機器視覺的關鍵組成部分。
應用在檢測方麵,通常使用Pentium或更高的CPU。一般來講,計算機的速度越快,視覺係統處理每一張圖片的時間就越短。
由於在製造現場中,經常有振動、灰塵、熱輻射等等,所以一般需要工業級的計算機。
06、檢測軟件
機器視覺軟件用於創建和執行程序、處理采集回來的圖像數據、以及作出“通過/失敗(PASS/FAIL)”決定。
機器視覺有多種形式(C語言庫、ActiveX控件、點擊編程環境等等),可以是單一功能(例如設計隻用來檢測LCD或BGA、對齊任務等等),也可以是多功能(例如設計一個套件,包含計量、條形碼閱讀、機器人導航、現場驗證等等)。
07、數字I/O和網絡連接
一旦係統完成這個檢測部分,這部分必須能與外界通信,例如需要控製生產流程、將“通過/失敗(PASS/FAIL)”的信息送給數據庫。通常,使用一張數字I/O板卡和(或)一張網卡來實現機器視覺係統與外界係統和數據庫的通信。
